ものづくりが大好きなみなさんこんにちは!
今回は、久しぶりにFUSION BASE管理人の作ってみたシリーズ第三弾をお届けします!
前回の作ってみたシリーズ「3Dプリンターでアクセサリーを作る」ポテトの指輪を作ってみたが2016年10月の記事なので、2年ぶりの作ってみたシリーズです!
今回はミニ四駆をRaspberry Piを使って遠隔制御してみたいと思います!!
用意したもの
- ミニ四駆

- タイヤ(大)
- Raspberry Pi

- モータードライバ
- ジャンパワイヤー
- ブレッドボード
- 抵抗器
- 長さ72mmのシャフト
- モバイルバッテリー
Raspberry Piとは?
「Raspberry Piって何だっけ!?」という方もいらっしゃるかと思うので、簡単にRaspberry Piについてご説明します。
Raspberry Piは、2012年にイギリスで開発された名刺サイズのマイコンボードで、Linuxを動作できます。
Linuxが動くので、Linuxで使えるライブラリやスクリプト言語を使って開発をすることができます!
また、Raspberry Piにはあらかじめ必要となるモジュールが搭載されているので、マイコン内部の知識や電子回路、プログラミングなど専門的な知識がなくても電子工作をすることができます!
詳しくRaspberry Piについて知りたいという方は、以前の記事
「5分で分かる!Raspberry Piでできることまとめ」
「初めての電子工作(マイコン)!ArduinoとRaspberry Pi」
も参照してみてください!
完成形をイメージしよう!
ミニ四駆を制御するにあたって必須になるのが、モーター、電池、モバイルバッテリー、Raspberry Pi、ブレッドボードです。
これらを小さいミニ四駆にどうやって搭載するかを考える必要があります。
今回は、モーターと電池はミニ四駆のシャーシの中にあるものを利用して、モバイルバッテリーはシャーシの下、Raspberry Pi、ブレッドボードは車体の上に取り付けたいと思います!
ちなみに、モバイルバッテリーあるから、モーター必要ないんじゃないかと思った方もいらっしゃるかと思いますが、モバイルバッテリーはRaspberry Piを、電池はモーターを動かす電力に使います。
※ Raspberry Piから供給される電力を使うとRaspberry Piが不安定になるため。
ミニ四駆を組み立てよう!
説明書を見ながらミニ四駆を組み立てていきます!
ただ、今回は、モーターと電池はシャーシの中にあるものを利用するため普通に組み立てるのではなく、ジャンパワイヤを使ってブレッドボードとつなげるようにします。

あと、モバイルバッテリーを下に付けるので車高を高くするために大きめのタイヤとシャフトを使います。

ボディーの上にはブレッドボードとRaspberry Piをつけます。
ブレッドボードは両面テープでくっつけて、Raspberry Piは下蓋をFusion 360でモデリングして3Dプリントしたものを土台にしてボディにくっつけました!
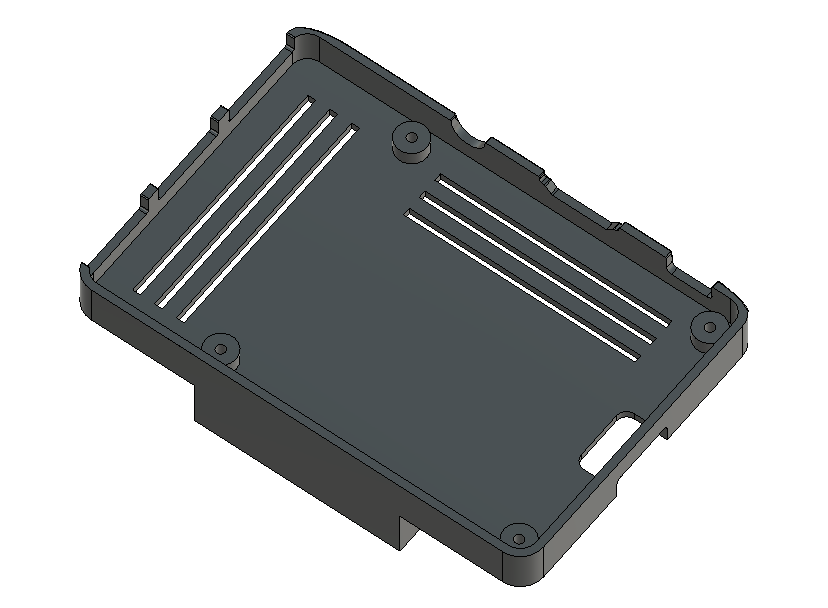
Fusion 360の使い方はこちらの記事「フリーでも使える高機能3D CAD Fusion360とは」を参照してください。
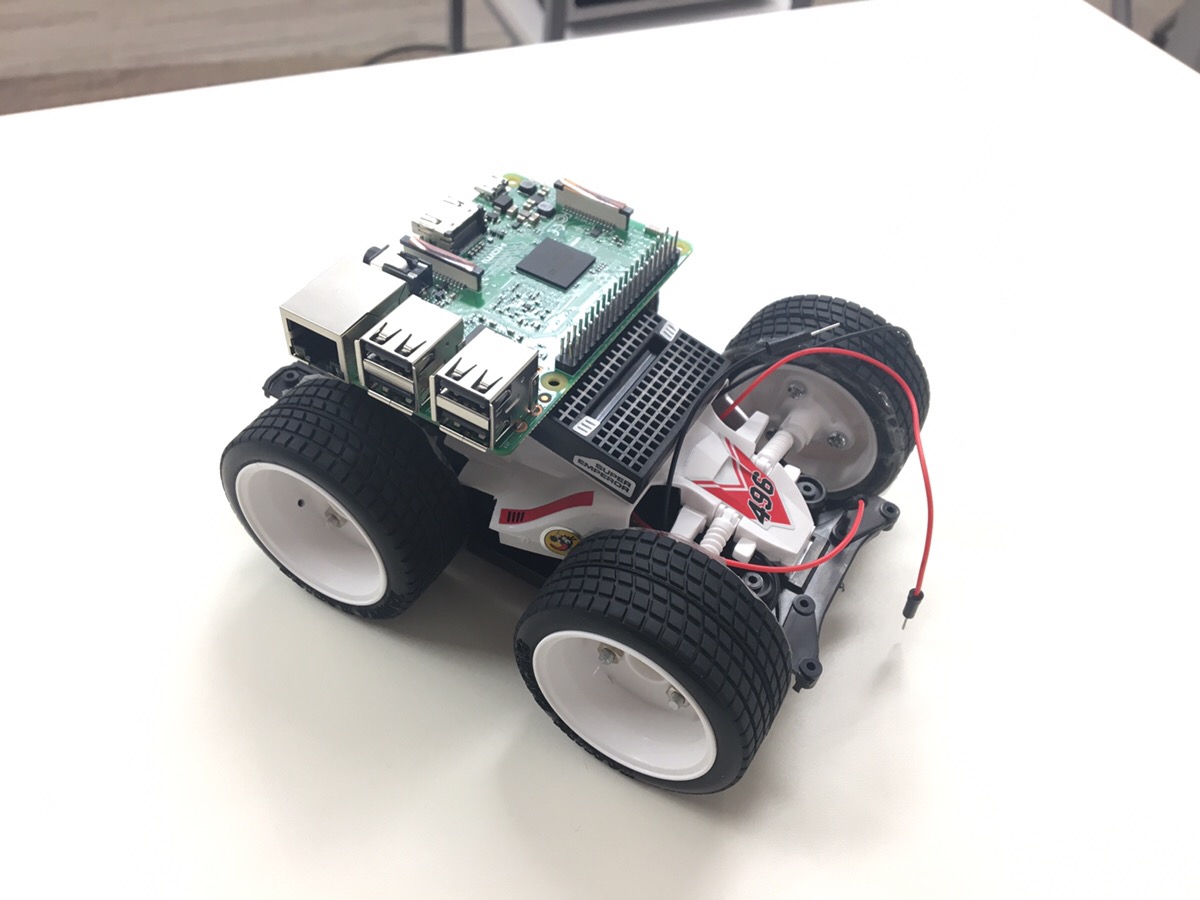
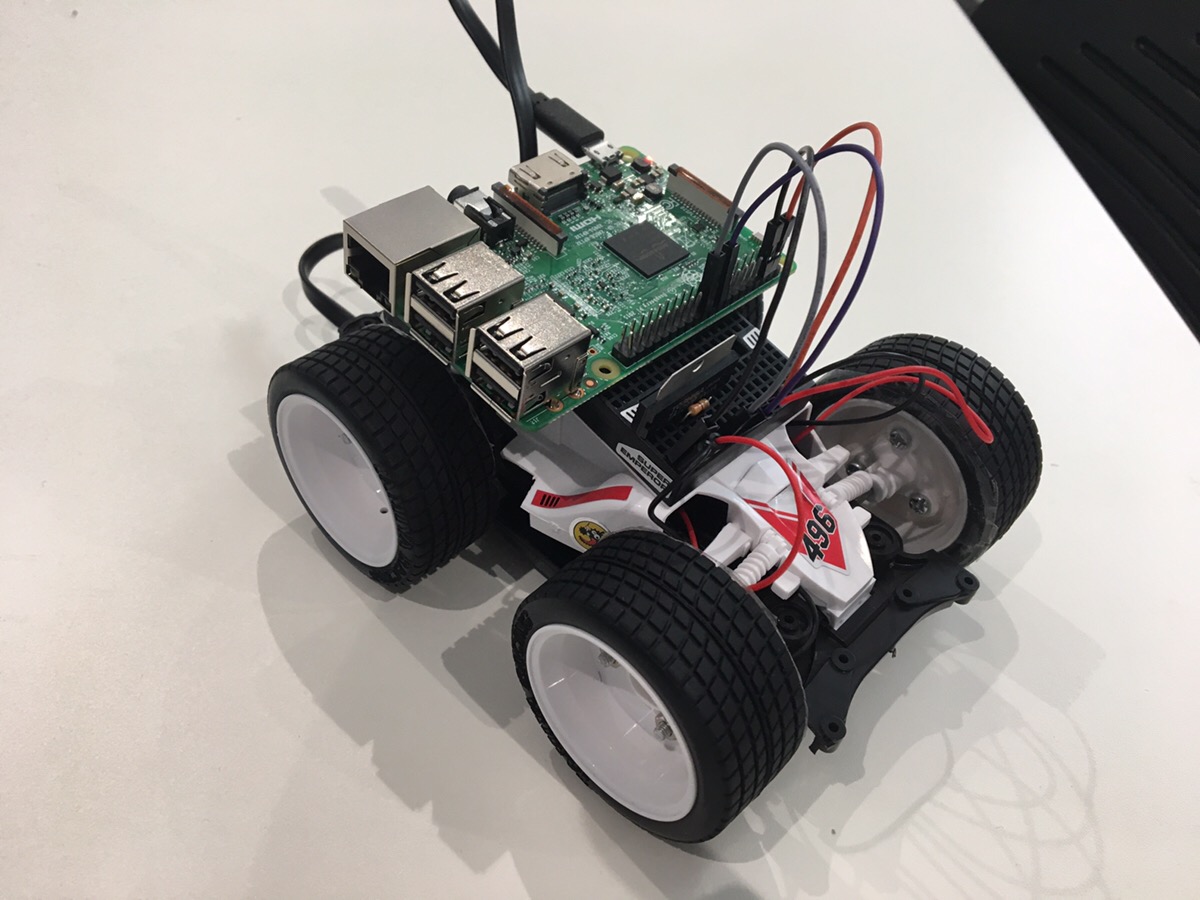
全部組み上げるとこんな感じです!
だいぶごつくなりましたが、コンパクトにまとまっているんじゃないでしょうか!!
配線しよう!
組み立てが終わったら、あとは配線をしていきます。
配線図はこんな感じです。
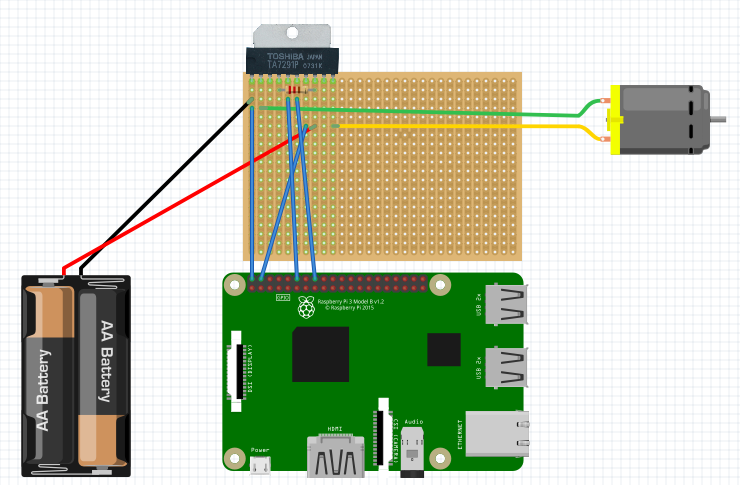
今回はモータードライバに「TA7291P」を使います。
モータードライバを利用する理由は、DCモーターを直接Raspberry Piにつないでしまうと電力をモータに取られてしまいRaspberry Piが不安定になるため、Raspberry PiとDCモーターを直接つなぐことなく制御するためにモータードライバを利用します。
また、モータードライバを利用すると回転の向きの制度や速度調整ができます。
TA7291Pは全部で10ピンあって5ピンと6ピンに入る信号によってモーターが回転します。
スマホで遠隔操作してよう!
配線完了!
これで完成なので、Raspberry Piを起動して遠隔操作してみます。
遠隔操作には「WebIOPI」を利用します!
WebIOPIはブラウザを通してRaspberry PiのGPIOにアクセスすことができます。
Raspberry PiのOSのインストール方法やWebiOpiのインストール方法はまた今度書きたいと思います。
WebIOPIでRaspberry PiのGPIOにアクセスします。
WebIOPIのGPIO Headerの画面にアクセスすると、Raspberry PiのGPIOの状態が表示されます。
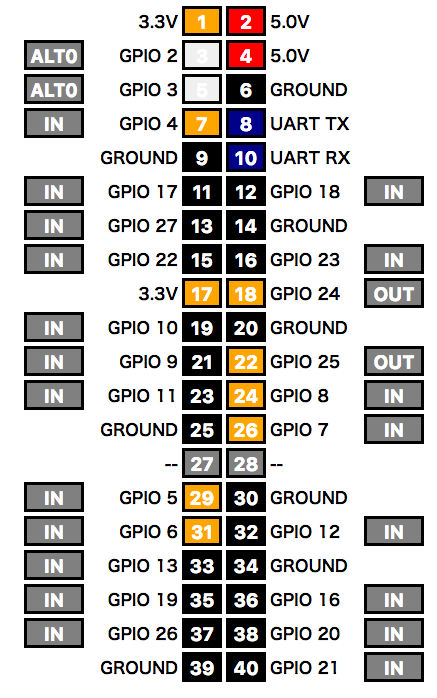
モータードライバの5ピンと6ピンにつないでいるGPIO(今回はGPIO24とGPIO25)を「OUT」に切り替えて「HIGH」にすると動きます。
今回はスマホで撮影するためPCで遠隔操作しましたが、スマホからアクセスすればスマホからも動かすことができます!
今度コースで走らせてみたいけどタイヤがゴツすぎた無理かな笑
まとめ
いかがだったでしょうか?
Raspberry Piを使って簡単にミニ四駆をIoT化して遠隔操作することができました!
もちろんネットが繋がっていればこのミニ四駆を世界中どこからでも動かすことができます!
動かす必要があるかどうかは置いておいて(笑)
もし、「自分もこういった身近なモノをIoT化したいけど難しそうだな。。。」と思われた方は、「IoT入門セミナー」がオススメです!!
このセミナーでは、今回のようにRaspberry Piを使ってモーターを制御するのはもちろん、センサーデータの可視化やセキュリティカメラの作り方なんかも学ぶことができます!
IoTの全体像やネットワークの仕組みも把握することができるので、「IoT全くわからない!!」という方にもオススメです!